KINEMATICS
Inertial frame of reference: Reference frame in which Newtonian mechanics holds are called inertial reference frames or inertial frames. The reference frame in which Newtonian mechanics does not hold is called non-inertial reference frames or non-inertial frames.
The average speed vav and average velocity of a body during a time interval? t is defined as,
vav= average speed
=? s/? t

Instantaneous speed and velocity are defined at a particular instant and are given by
Note:

(a) A change in either speed or direction of motion results in a change in velocity
(b) A particle which completes one revolution, along a circular path, with uniform speed is said to possess zero velocity and non-zero speed.
(c) a particle can’t possess zero speed with a non-zero velocity.
Average acceleration is defined as the change in velocity over a time interval? t.
The instantaneous acceleration of a particle is the rate at which its velocity is changing at that instant.
The three equations of motion for an object with constant acceleration are given below.
![]()
(a) v= u+at
(b) s= ut+1/2 at2
(c) v2=u2+2as
Here u is the initial velocity, v is the final velocity, a is the acceleration, s is the displacement traveled by the body and t is the time.
Note: Take the ‘+ve’ sign for a when the body accelerates and takes ‘–ve’ sign when the body decelerates.
The displacement by the body in nth second is given by,
sn= u + a/2 (2n-1)
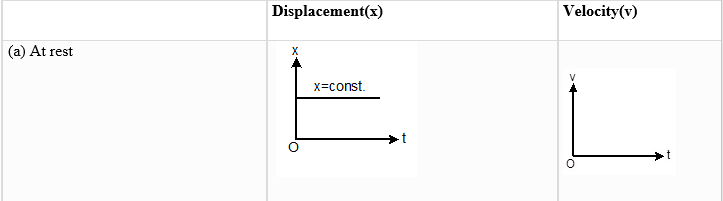
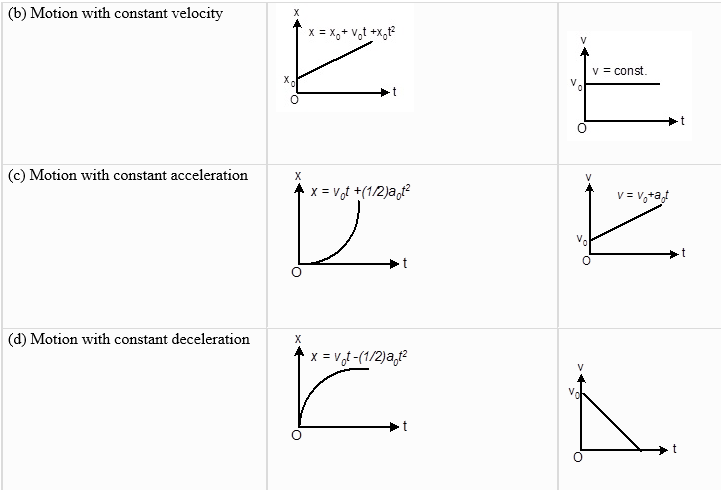
Position-time (x vs t), velocity-time (v vs t) and acceleration-time (a vs t) graph for motion in one-dimension:
(I) Variation of displacement (x), velocity (v), and acceleration (a) to time for different types of motion.
Scalar Quantities:
A scale or scalar sum of physics is often followed by units of measurement, may be represented by a single aspect of a number field such as a real number. A scalar is typically a physical sum of magnitude, probably a symbol, and no other properties. (e.g-mass, length, volume, density)
Vector Quantities:
Vector quantities are those quantities that require magnitude as well as direction for their complete specification. (e.g-displacement, velocity, acceleration, force)
Null Vector (Zero Vectors):
It is a vector having zero magnitudes and an arbitrary direction.
When a null vector is added or subtracted from a given vector the resultant vector is the same as the given vector.
The dot product of a null vector with any arbitrary is always zero. Cross product of a null vector with any other vector is also a null vector.
Collinear vector:
Vectors having a common line of action are called a collinear vector. There are two types.
Parallel vector (θ=0°):
Two vectors acting along the same direction are called parallel vectors.
Anti-parallel vector (θ=180°): Two vectors which are directed in opposite directions are called anti-parallel vectors.
Co-planar vectors- Vectors situated in one plane, irrespective of their directions, are known as co-planar vectors.
Vector addition:
Vector addition is commutative-![]()
Vector addition is associative-![]()
Vector addition is distributive-![]()
Triangles Law of Vector addition:
If two vectors are represented by two sides of a triangle, taken in the same order, then their resultant is represented by the third side of the triangle taken in the opposite order.
The magnitude of the resultant vector:-
R=√(A2+B2+2ABcosθ)
Here θ is the angle between and .
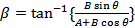
If β is the angle between and,
then,
![]()
If three vectors acting simultaneously on a particle can be represented by the three sides of a triangle taken in the same order, then the particle will remain in equilibrium.
So,![]()
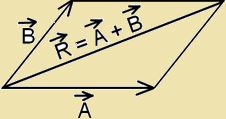
Parallelogram law of vector addition:

R=√(A2+B2+2ABcosθ),
Cases 1:
When, θ=0°, then,
R= A+B (maximum), β=0°
Cases 2:
When, θ=180°, then,
R= A–B (minimum), β=0°
Cases 3:
When, θ=90°, then,
R=√(A2+B2), β = tan-1 (B/A)
The process of subtracting one vector from another is equivalent to adding, vectorially, the negative of the vector to be subtracted.
So,
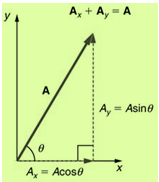
Resolution of a vector in a plane:
Product of two vectors:
(a) Dot product or scalar product:
![]()
![]()
Here A is the magnitude of , B is the magnitude of and θ is the angle between and .
(i) Perpendicular vector:
![]()
(ii) Collinear vector:
![]()
When Parallel vector (θ=0°),
When Antiparallel vector (θ=180°),
(b) Cross product or Vector product:
![]()
Or,
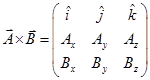
Here A is the magnitude of , B is the magnitude of ,θ is the angle between and/and is the unit vector in a direction perpendicular to the plane containing and .
(i) Perpendicular vector (θ=90°):
(ii) Collinear vector:-
When, Parallel vector (θ=0°),(null vector)
When, θ=180°,(null vector)
Unit Vector:
The unit vector of any vector is a vector having a unit magnitude, drawn in the direction of the given vector.
In three dimensions,
Area:
Area of triangle:
Area of parallelogram:
Volume of parallelepiped:
Equation of Motion in an Inclined Plane:
Perpendicular vector:
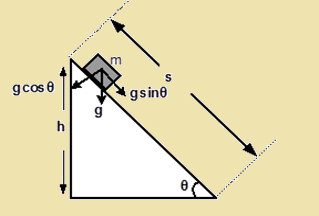
At the top of the inclined plane (t = 0, u = 0 and a = g cinq ), the equation of motion will be,
(a) v= (g sinθ)t
(b) s = ½ (g sinθ) t2
(c) v2 = 2(g sinθ)s
(ii) If the time taken by the body to reach the bottom is t, then s = ½ (g sinθ) t2
t = √(2s/g sinθ)
But sinθ =h/s or s= h/sinθ
So, t =(1/sinθ) √(2h/g)
(iii) The velocity of the body at the bottom
v=g(sinθ)t
=√2gh
The relative velocity of object A to object B is given by
VAB=VA–VB
Here, VB is called reference object velocity.
Variation of mass:- Following Einstein’s mass-variation formula, the relativistic mass of the body is defined as,
m= m0/√(1-v2/c2)
Here, m0 is the rest mass of the body, v is the speed of the body and c is the speed of light.
Projectile motion in a plane:- If a particle having initial speed u is projected at an angle θ (angle of projection) with the x-axis, then,
Time of Flight, T = (2u sinα)/g
Horizontal Range, R = u2sin2α/g
Maximum Height, H = u2sin2α/2g
Equation of trajectory, y = xtanα-(gx2/2u2cos2α)
The motion of a ball:
- When dropped:
Period, t=√(2h/g) and speed, v=√(2gh
- When thrown up:
Time period, t=u/g and height, h = u2/2g
Condition of equilibrium:
(a)![]()
(b) |F1+F2|≥|F3|≥| F1-F2|